Srimech.com
This is Jim MacArthur's site for mechanical computers, electronics and other projects.
Current projects
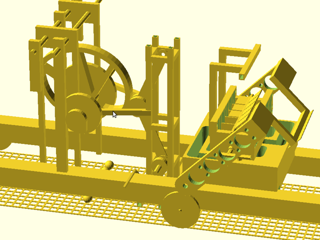
Millihertz 5 Mechanical Computer
2025-03-07

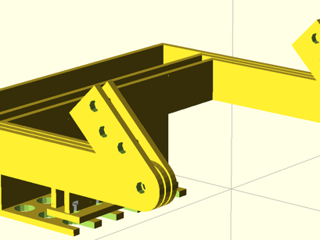
Arm-mounted CRT Raspberry Pi unit
2018-09-15

General mechanical logic
2017-09-16

Zeta toggle-switch computer
2015-04-11

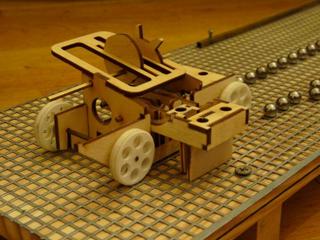
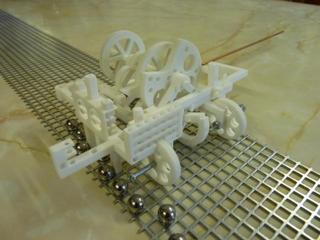
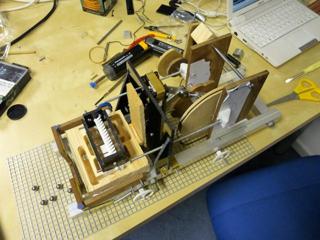
Mechanical Turing Machine
2012-06-07
List of blog entries (by date)
Millihertz 5 Progress August 2022
2022-08-21

Millihertz 5 Progress April 2020
2020-04-10
Arm-mounted CRT Raspberry Pi unit
2018-09-15
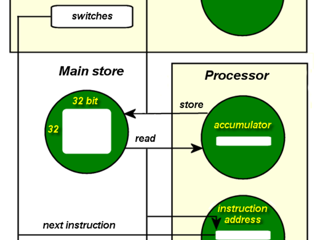
Mechanical replica of the Manchester SSEM (Baby)
2018-05-10
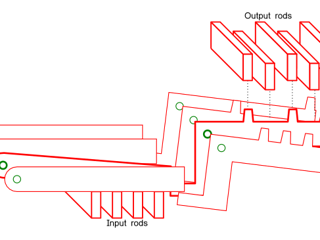
Mechanical array logic
2017-09-16
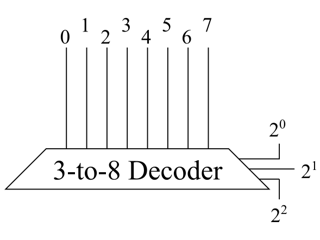
Mechanical decoder logic
2017-06-25
Langton's Ant with Hexbugs
2017-01-08
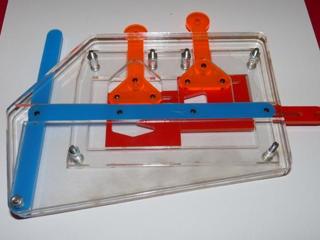
Sliding plate logic gates
2015-09-29
AVR Minimus servo controller
2015-04-12
Zeta toggle-switch computer
2015-04-11
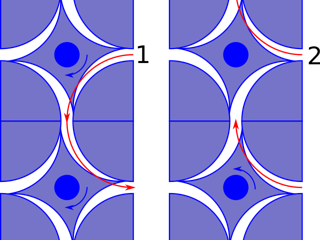
Rule 110 automaton, version 2
2014-07-29
Failed experiment: Water logic gates
2014-03-23
Grue detection t-shirts
2013-06-13
Error correction of the NPL time signal
2012-11-02

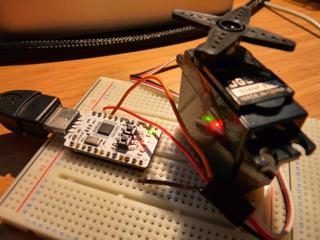
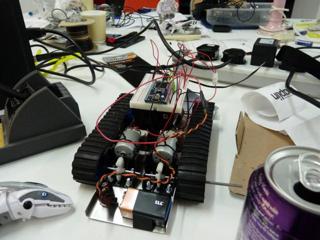
Simple, headphone-controlled phone robot
2012-08-13

More 2D Game demos
2012-08-12

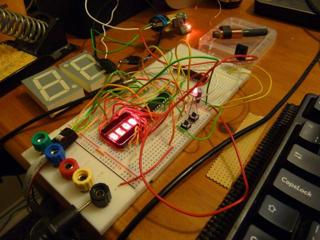
Investigating Raspberry Pi performance problems
2012-07-18
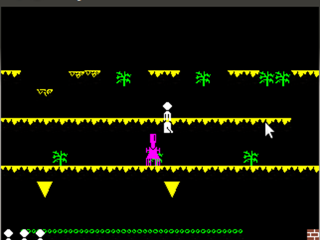
2D Platform games with PyGame
2012-07-03

Exhibiting the Mk2 Turing machine
2012-06-07

Chorded keyboard for mobile phones
2012-06-07
Automating layout of laser-cut models
2012-03-15
Turing Machine and Maker Faire
2011-03-16
3D printed cellular automaton
2011-03-06
Turing machine preview video
2011-01-08
December machinery
2010-12-30
BigTrak + IGEP
2010-12-22
September progress on the Turing machine
2010-11-24
November Turing machine update
2010-11-24
Robot Hackday success
2010-10-31

Fab Lab success
2010-07-31
Plans for a mechanical Turing machine
2010-07-31
Camping with dry ice
2010-07-30

Golf GTI shakedown
2009-12-15

Madlabs and Hackspaces
2009-12-15

Opening a WRT150N
2008-11-09

Electric pressure gauges
2008-11-09
Contact details
CV
RSS Feed for blog articles
Mastodon